
How to choose ESC drone – FPV Electronic Speed Controllers
Welcome to this new article of the components guide dedicated today to ESCs.

Here we will understand what an ESC is, know its role on our FPV Drones and distinguish its characteristics in order to choose a model adapted to our needs.
What is an ESC ?
ESC is the acronym for “Electronic Speed Controller”. But what is it controlling? The rotation of your FPV motors, of course. The role of an ESC is to receive the information provided by your flight controller and, according to it, to make your FPV brushless motors turn more or less fast.
Inputs and Outputs of an ESC
The inputs and outputs of an ESC are standardized; they are always the same.
- Power supply
The power supply received by the ESC will be transmitted to the motor. These two wires are soldered to the + and – terminals available on the PDB and dedicated to this use. - Signals The second pair of wires (much thinner) is available at the input of our component. These allow the transit of instructions between the FC and the ESC. In our case, the FC must have at least 4 pads dedicated to the ESC signals to control the 4 associated motors. These are often found under the name Signal “S1” for motor 1, “S2” for motor 2, and so on …
Outputs of an ESC
- Motor outputs
These outputs are three in number and are in the form of soldering pads placed at the end of the ESCs. These pads are intended to solder the 3 motors wires to supply current and voltage to the 3 phases of the FPV motors. - BEC
The BEC for “Battery Eliminator Circuit” is intended to provide a power supply, usually 5 Volts, to other components. In aeromodelling, this is often used to power the receiver and servos of a plane or helicopter, which require a specific voltage and do not require a high current to operate.
In the case of FPV drones, we use a power distribution board, aka PDB, that works to provide the various voltages required to the components of your machine. It is, therefore, unnecessary to have an additional power supply via ESCs.
Characteristics of an ESC
The characteristics of an ESC are its shape, its admissible voltage, its admissible current, and its protocol. We will see these elements right away.
The two main shapes of an ESC
There are two types of ESC, the 4in1 and the classic individual ESCs.
The 4in1 ESC
This component is composed of 4 ESCs arranged on the same electronic board. This board is approximately the same size as your flight controller and will be stacked under it for practical reasons. You can often buy a Stack FC + ESC that will be very easy to connect. This option is convenient to save weight and time during assembly and disassembly!
The individual ESC
In that case, you use one single ESC for each FPV motor. There is one at the end of each FPV motor, placed on the arm of the quad.
They come in the form of a PCB whose size generally varies according to its current-carrying capacity and the quality of the onboard components.
The rated Voltage of an ESC
In the same way, as for a PDB, the ESCs can accept a range of voltages that are more or less large depending on the model. We, therefore, find the same inscriptions specifying the number of “S” accepted by the circuit.
As a reminder, the number of “S” written on the ESC refers to the number of cells present in the LiPo’s that you will use on your machine. So, as for the PDB, make sure you choose equipment compatible with the batteries.
When starting your build, you will always need to choose an appropriate combo of ESC-Motor kV-Battery voltage « S » and check if the ESC is rated with enough current (Amperes) to work with your motor.
The rated current of an ESC
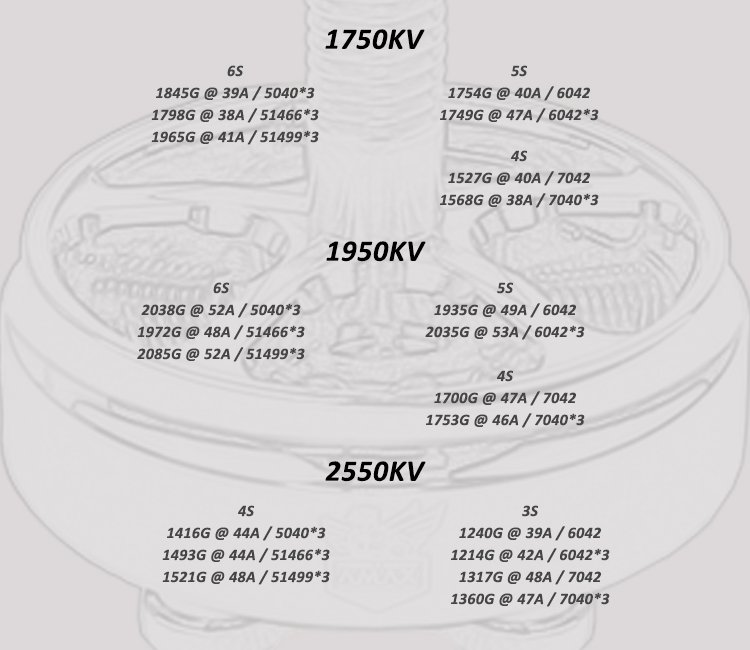
The nominal current is a crucial point to take into account. Indeed, it is directly related to the motors you want to use. Let’s take as an example an AMAX Performance 2207/1750kv delivering 39 amps on 6S on a 5′ FPV drone. The ESC connected to this motor must therefore be capable of supplying the 39 amperes requested. Otherwise it will be damaged, or in some cases, it will go up in smoke!
Note that the 39 amps required by the motor are in the case where the throttle is pushed to 100%. You should also consider the peak current. This is a current above the rated current that the ESC will tolerate for a short time. You will find this value in descriptions as “burst current”.
This parameter is expressed in amperes and seconds, for example, “50a (10sec)” which means 50 amperes tolerated over a maximum duration of 10 seconds.
How to choose the right ESC ?
With this knowledge, we can start from two distinct philosophies for the choice of an ESC:
- Choose an ESC whose nominal current is equal to the maximum current of the chosen motor
- Choose an ESC whose nominal current is lower but which has a peak current equal to the maximum current of the motors
My advice is not to save money on this kind of component and prefer ESC, whose nominal current is equal to the max current your FPV motor will require. A commun rule in FPV is “Buy cheap = Buy twice”.
Safety
First of all, for safety reasons. Electronics is not always an exact science, and some components can go up in smoke when pushed to their limit. It would be a shame to see your machine fall from the sky because of a burnt-out ESC on a throttle stroke, wouldn’t it?
To avoid pushing the ESC to its limits, choosing a model with a nominal current equal to the maximum motor current is preferable. In this way, the ESC will always have a comfortable margin in case of heavy solicitation, its “burst” value not being reached.
The Propellers
The style and preferences of an FPV pilot evolve; it is a fact. Mainly thanks to all those emptied LiPo batteries. You may currently fly with a specific propeller model, which will change according to your desires and your piloting skills.
The technology also evolves, and new propeller models get to the market every year. But mounting propellers on a motor is not a trivial thing.
Its diameter and pitch must be in adequacy with the motor’s characteristics. All propellers are not equal in the face of nature and will not have the same torque nor the same efficiency. Therefore, it is expected that your motors consume more or less depending on which propeller will be mounted on its bell.
Remember that the higher the number of blades and the pitch value on a propeller, the more the motor will consume. If the motor consumes more power, the ESC behind it must be able to power it no matter what.
Therefore, it is a good idea to keep a small margin to be able to use more “greedy” propellers in the future.
The tolerance of an ESC to a high peak current for a few seconds is very useful here to withstand high accelerations with propellers with a large pitch.
The ESC protocol
If I had to summarize the role of an ESC, we could describe it as an interpreter between the FC and the motors so that they can communicate with each other.
But why and how are these exchanges of information carried out? We will see it right away!
The dialogue between the FC, the ESC, and the FPV Motors
To keep your FPV drones in the air, your flight controller commands the 4 motors in real-time to vary their speed consistently. These commands are not sent directly to the motors but to the ESCs, which will convert these commands and power the motors accordingly.
If the instruction sent by the flight controller is, most of the time, the rotation speed of the engine, it is not always the case. It can also be the emission of a beep (like when you connect a LiPo) or feedback from the ESC to the FC, giving the actual rotation speed of the motor.
This communication between flight controller and ESC is digital. It is done according to precise communication protocols, which can be :
- PWM
- Oneshot125
- Multishot
- Dshot600
- DShot1200
- Dshot2400
- ProShot
- etc …
Originally, PWM was used to control many things on a model aircraft, particularly the servos. This protocol is used directly by the radio receiver and sent to the servos connected directly to it.
The communication protocols have evolved with time and become much faster.
The order of appearance of these protocols follows more or less the same pattern, the last one being inevitably faster than its predecessor. It is logical that the next time you buy something, you decide to take the fastest protocol, and you will be right. Is it necessary to change your old ESCs for faster models? I don’t think so; unless you are an excellent pilot, you probably won’t notice the difference.
The ESC Firmwares
Your ESCs are smarter than you think! They work thanks to a program stored inside that allows them to decode the FC signals. Some even have the luxury of being customizable.
Just as your flight controller works with BetaFlight, RaceFlight or Kiss, an ESC also has its own firmware. Among them are :
- SimonK
- BLHeli
- BLHeli_S
- BLHeli_32
- BlueJay
- KISS
SimonK is not used anymore, or very little because of its relative age. However, it was a quality firmware 6 years ago.
BLHeli is often used in the world of FPV drones. Its versions have evolved, from BLHeli to BLHeli_S to BLHeli_32 nowadays. Why 32? Because these ESC work with powerful chips calculating on 32 bits. They can thus calculate information faster, receive and respond to complex commands. Reversing motors, consumption of each motor, the possibilities are almost infinite with this equipment.
KISS for Keep It Super Simple will be intended to function in concert with the KISS flight controllers of the brand.
BlueJay is a variation of BLHeli-S. It allows using bidirectional Dshot on BLHeli-S ESC. Bidirectional Dshot has to be set up in your Flight Controller, and I recommend flashing BlueJay on your old BLHeli_S ESC.
Filtering and “Noise”
We talked about it in the article on PDBs. Current filtering has become almost essential on a quad. The added capacitor limits the “noise” present in the electrical circuit. I’ll give you a hint, who are the main noise generators? Motors and ESCs! Why? The FPV motors, while turning, generate current. If it is not filtered, this current goes up in the ESC, then in the rest of the circuit. At the same time, the ESCs process weak and digital signals coming from the FC. This whole cocktail can make many mistakes if all these signals do not stay in their place. This is why it is crucial to make a point of choosing your ESCs.
There is one crucial thing to highlight concerning filtering. All recent components, especially PDB, FC, and ESC, already have many capacitors. If you are looking at new or recent hardware, the chances are that you will not need to add a big, ugly capacitor to your machine.
Should I connect the ground wire ?
At first, we could start from the fact that the electrical circuit of FPV drones is a closed circuit with all its common grounds. Just check it by using a multimeter to test the pads of your PDB or FC. You will notice that all the pads marked “GND” or “-” are linked together. If the ground is common to all of them, the signal ground is also common to the ESC’s high current supply ground.
Why bother to connect it then? To stay on simple notions, I would argue that the shortest path is always the best for any electrical circuit. A mass serves as a reference for its phase, the zero level. If its path is not direct to the CF, it can be disturbed by as many elements as it will cross, namely wires and the PDB. If the signal reference is disturbed, the signal is much more difficult to interpret, and both the ESC and the CF will have a hard time understanding each other.
When you are talking to someone, do you understand clearly what that person has to say when he is in front of you? Do the same experiment by standing at the back of a room full of other people. Not sure your discussion will be as comfortable as in the first case! For your ESC, it’s the same thing.
However, there are FCs that do not have connections to the ground of each ESC. That’s often the case with All In One boards because they have both the FC and PDB function. You are then free to solder the ground in common with the power supply.
What ESC should you choose ?
That’s a tricky question to conclude this short guide. So I will make it a little personal and write about what I consider myself when choosing an ESC.
I use 3 different ESCs for different purposes and reasons
For Freestyle and Bando flying, I use exclusively KISS ESC 25A individual ESC. My setups with KISS ESC are Bulletproof. I crash them like hell, and I rarely burn any ESC.
They are expensive, but they worked so long that it is worth the investment, and they fly SO WELL (in 6S even if they are rated for 5S).
The main issue is that It is hardly available nowadays.
For FPV Racing, I use the same FPV drone built three years ago, which I also crash like crazy. It is a Racerstar 4in1 anniversary 35A that worked on BLHeli_S, but I changed to BlueJay firmware, and It flies better now. I don’t use KISS on racing drones because I prefer to keep it for Freestyle. Moreover, BLHeli_S ESC is less expensive than KISS or BLHeli_32 ESC.
I tested some BLHeli_32 ESC for my Racewhoop. Racewhoops if not built with excellent components, can have huge desyncs. And we can not change the ESC settings on KISS, so I used BLHeli_32 ESC with particular settings. It works well, and I recommend it if you don’t want to fly KISS.

I hope, that my prose has been instructive.
FLY SAFE!

